

تطورت الأرجل الصناعية في الآونة الأخيرة بوتيرة سريعة، فقد توصل بعض العلماء إلى ركبة تعيد للإنسان مشيته الطبيعية. إلا أن هذه الأخيرة تعتمد في أداء هذه المهمة على معالجات، و”جايروسكوبات”، ومقاييس التسارع، ونظام هيدروليكي مما يرفع تكلفته إلى ما يقارب 50,000 دولار. في هذا الصدد عمل Amos Winter، أستاذ مساعد في جناح الهندسة الميكانيكية بمعهد ماساتشوستس للتكنولوجيا، على تطوير ركبة هامدة تستجيب لحركة الجسم بنفس الدقة التي وصلت إليها التقنية الآن وبتكلفة أقل.
© Amos Winter, Murthy Arlekatti et al.
إن هذا النوع من الإعاقات من شأنه أن يحد من كفاءات وفرص الناس بشكل ملحوظ بل إنها تحول دون اندماجهم في مجتمعاتهم. لذا كان من الضروري توفير البدائل الصناعية بتكلفة تخفف الضرر عوض أن تزيد الطين بلة.
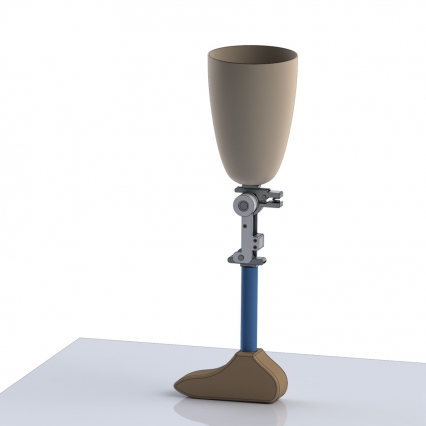
ففي الهند مثلا، حيث يقطن حوالي 230,000 من مبتوري السيقان أو جزء منها، قام الباحث بتجربة نموذج ساق اصطناعية تتكون من أجزاء ميكانيكية بسيطة كالنابض والمضخة الهيدروليكية وذلك بعد تمكنهم من حساب العزم الذي يجب توفيره من قبل الركبة بناء على كتلة أجزاء الساق حتى يتأتى للجهاز أن يستجيب لمختلف حركات الجسم كساق طبيعية.
وتجدر الإشارة هنا إلى أننا نتحدث عن بدائل “هامدة” لا تنتج أية حركة من تلقاء نفسها، بل تستجيب لحركة الجسم وتُكيِّفها حتى تصبح أكثر مرونة وديناميكية. أما التقليدية منها فلا تتناسق مع حركة الجسم ولا تُشعر صاحبها بالراحة أثناء المشي، بل أكثر من ذلك يمكنك تمييز هؤلاء الأشخاص بسهولة. ذلك أن العزم المطبق على الساق الصناعية من قبل الشخص لا يخمد قبل أن تطأ القدم الأرض فتكون الحركة مَشوبة بمجموعة من الصدمات تحول دون سلاستها. بينما في الأخرى تنحني الساق مباشرة قبيل وضع القدم على الأرض، مما يجعل مركز ثقل الشخص مستقراً.
“لمحاكاة المشية الطبيعية”، يقول Winter،” يجب محاكاة القوى المتغيرة خلال العملية أو بالأحرى محاكاة مخطط العزم”. لذا كان الفريق في حاجة إلى دراسة الحركة الطبيعية أولاً واستخراج المعلومات اللازمة. إلا أنهم ولحسن حظهم عثروا عليها على طبق من ذهب في إحدى الأوراق البحثية التي تصف بدقة خطوة شخص (أو دورة مشي واحدة) من زاوية دوران، كتلة كل جزء من أجزاء الساق، وكذا مقاومة السطح (أي تأثير سطح الأرض على الساق على مستوى القدم).

© Amos Winter, Murthy Arlekatti et al.
فيسرت لهم هذه البيانات حساب مخطط العزم بالنسبة للمشية الطبيعية، ثم أوجبت عليهم تكييفهذا الأخير مع الساق الاصطناعية كونها أخف من الطبيعية بثلث أو نصف الكتلة. ذلك أن استعمال المخطط الصحي الطبيعي سيفكك الساق مع مرور الزمن.
يكمن التحدي الآن في إيجاد وسيلة لإنتاج هذا العزم المعدَّل اعتماداً على أجزاء ميكانيكية بسيطة. وقدم الفريق نموذجاً متكونا من نابض ومخمدين يلتوي مباشرة قبيل لمس القدم للأرض. في الوقت الذي يُبطئ أحد المخمدين حركة التواء الساق للوراء. بينما يقوم الثاني بالدور ذاته حينما تعود الساق إلى الأمام وقبيل لمس مؤخرة القدم للأرض.
ويضيف الباحث أن هذا العمل لا يزال في بداية الطريق، ولن يستحق التغني بالنصر إلا بعد توفر المنتج بحوزة شطر كبير من مبتوري الأرجل وفي حلة أبهى وأريَح من شكل النموذج.
المصدر: معهد ماساتشوستس للتكنولوجيا
الكاتب:
المدقق اللغوي:

